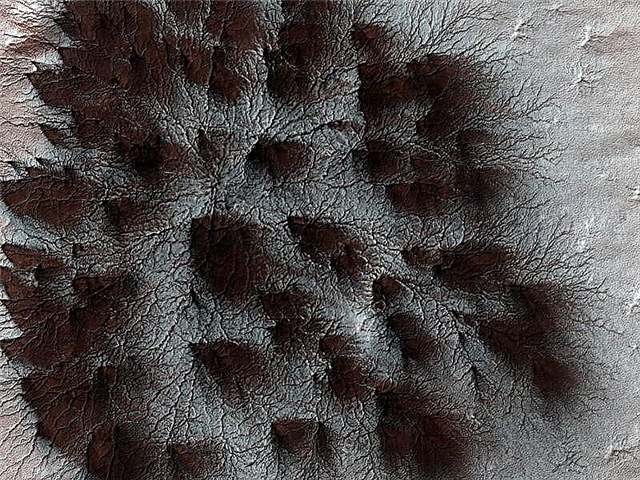
Αν έχετε δει τις εικόνες υψηλής ανάλυσης HiRISE από το Mars Reconnaissance Orbiter ή έχετε την ευκαιρία να εξερευνήσετε το νέο Google Mars, γνωρίζετε ότι ο Άρης είναι γεμάτος με κρατήρες, βουνά, γλάρους και κάθε είδους ενδιαφέροντα - και επικίνδυνα - εδάφη . Περιοχές όπως αυτές με πολυεπίπεδη εναποθέσεις, ιζήματα, θραύση και βλάβη είναι ακριβώς ο τύπος τόπων για να αναζητήσετε τις πηγές μεθανίου που παράγονται στον Άρη. Ωστόσο, είναι πολύ επικίνδυνο να στείλουμε το τρέχον στυλ μας rover, συμπεριλαμβανομένου του 2011 Mars Science Laboratory (MSL), σε επικίνδυνο έδαφος. Όμως, μηχανικοί από την JPL, μαζί με μαθητές στο Ινστιτούτο Τεχνολογίας της Καλιφόρνιας, έχουν σχεδιάσει και δοκιμάσει ένα ευέλικτο ρομπότ χαμηλής μάζας που θα μπορούσε να προστεθεί σε μεγαλύτερους αναβάτες όπως το MSL που μπορεί να καταρρέει από γκρεμούς, να ταξιδεύει άψογα σε απότομο και βραχώδες έδαφος και να εξερευνά βαθιά κρατήρες.
Αυτό το πρωτότυπο rover, που ονομάζεται Axel, μπορεί να βοηθήσει μελλοντικά ρομποτικά διαστημόπλοια να εξερευνήσουν και να διερευνήσουν καλύτερα ξένους κόσμους όπως ο Άρης. Στη Γη, η Axel μπορεί να βοηθήσει στις επιχειρήσεις αναζήτησης και διάσωσης.
«Η Axel επεκτείνει την ικανότητά μας να εξερευνούμε εδάφη που δεν μπορούσαμε να εξερευνήσουμε στο παρελθόν, όπως βαθιά κρατήρες με κατακόρυφα κεκλιμένα ακρωτήρια», δήλωσε ο κύριος ερευνητής της Axel, Issa A.D. Nesnas, του τμήματος ρομποτικής και κινητικότητας της JPL. «Επίσης, επειδή το Axel είναι σχετικά χαμηλής μάζας, μια αποστολή μπορεί να μεταφέρει έναν αριθμό Rover Axel. Αυτό θα μας έδινε την ευκαιρία να είμαστε πιο επιθετικοί με το έδαφος που θα εξερευνήσαμε, διατηρώντας παράλληλα τον συνολικό κίνδυνο διαχειρίσιμο. "
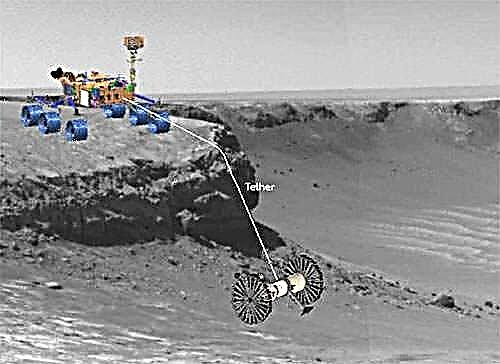
Ο Νέσνας είπε ότι ο Άξελ είναι σαν ένα yo-yo - βρίσκεται σε μια πρόσδεση που συνδέεται με ένα μεγαλύτερο rover και μπορεί να ανέβει και να κατεβεί τις πλευρές των κρατήρων, των φαραγγιών και των γλάρων, εξερευνώντας περιοχές που δεν είναι ασφαλείς για άλλους rover.

Ο απλός και κομψός σχεδιασμός του Axel, ο οποίος μπορεί να λειτουργεί τόσο ανάποδα όσο και δεξιά προς τα πάνω, χρησιμοποιεί μόνο τρεις κινητήρες: έναν για να ελέγχει καθένα από τους δύο τροχούς του και ένα τρίτο για έλεγχο ενός μοχλού. Ο μοχλός περιέχει μια σέσουλα για τη συλλογή σεληνιακού ή πλανητικού υλικού για να μελετήσουν οι επιστήμονες και προσαρμόζει επίσης τις δύο στερεοφωνικές κάμερες του ρομπότ, οι οποίες μπορούν να γέρνουν 360 μοίρες.

Το κυλινδρικό σώμα της Axel διαθέτει δυνατότητες υπολογιστών και ασύρματων επικοινωνιών και έναν αδρανειακό αισθητήρα που λειτουργεί αυτόνομα. Παρέχει επίσης μια πρόσδεση που η Axel μπορεί να ξετυλίξει για να κατεβεί από ένα μεγαλύτερο σημείο προσγείωσης, rover ή άγκυρα. Το rover μπορεί να χρησιμοποιήσει διαφορετικούς τύπους τροχών, από μεγάλους αναδιπλούμενους τροχούς έως φουσκωτούς τροχούς, οι οποίοι βοηθούν το rover να ανέχεται μια σκληρή προσγείωση και να χειρίζεται βραχώδες έδαφος.
Η Axel βρίσκεται σε εξέλιξη από το 1999 και φοιτητές από το Caltech, το Purdue University και το Arkansas Tech University έχουν συνεργαστεί με την JPL όλα αυτά τα χρόνια για να αναπτύξουν αυτό το ευέλικτο rover.
Για περισσότερες πληροφορίες σχετικά με το Axel, ανατρέξτε στη σελίδα APL της JPL και στον ιστότοπο της Caltech Axel.